|
In de Signalglocke, jaargang 31 / september 2015, staat een artikel over het zelf maken van
een transport kabelbaan (Deel 2 van 3).
Hier is de digitale versie met nog extra foto's en film beelden.
|
|
Kabelbaan / transportlift in model
Door Hans Hosang
|
|
In deel 1 heb ik beschreven hoe ik de kabelbaan heb gemaakt en welke hordes ik daar ben tegen gekomen.
In dit 2de deel van de beschrijving wil ik aandacht besteden aan het poppetje dat een melkfles o.i.d.
vanaf een aanhanger op de kabelbaan moet gaan zetten.
|
 |
Positionering en beweging.
Om 2 bewegende dingen (poppetje en kabelbaan) soepel t.o.v. elkaar te laten verlopen, moet er afstand
tussen zijn. Dus het poppetje moet naar voren en naar achteren kunnen bewegen.
Welke bewegingen zijn er nog meer nodig om te laden en te lossen? De armen moeten omhoog en omlaag kunnen
bewegen om iets op te tillen en het poppetje moet kunnen draaien om een lading ergens anders weg te kunnen zetten.
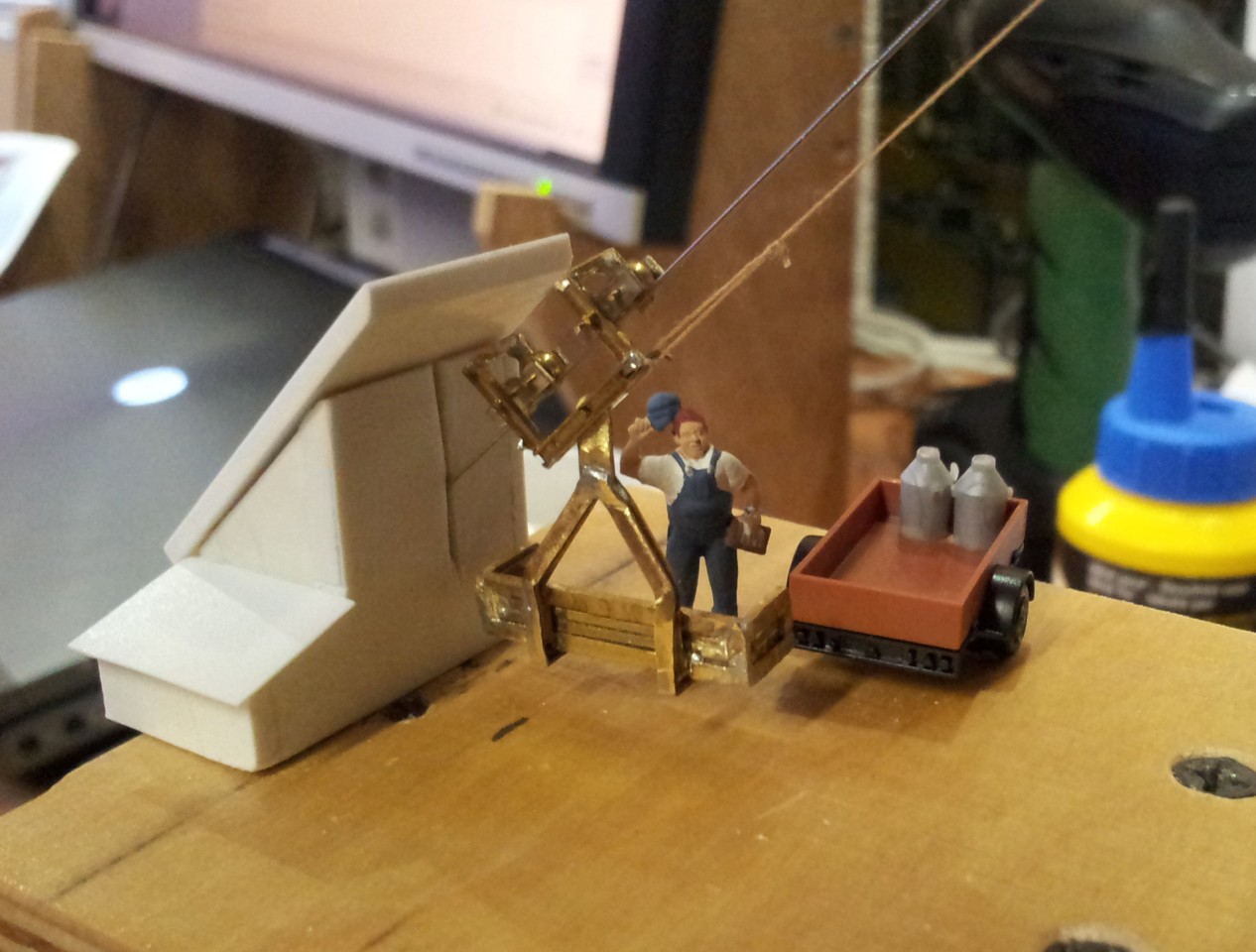
Ik ben ervan uit gegaan dat de aanhanger naast de kabelbaan staat, dan is een draai van 90 graden genoeg,
zie foto hiernaast.
De vraag is of het poppetje iets hoog genoeg kan optillen om het over rand van de aanhanger te tillen
of dat die rand opklapbaar moet worden. Dat moet blijken tijdens de tests.
|
De bewegingen.
Ik heb 3 bewegingen gedefinieerd maar ik wil er eigenlijk geen 3 motoren of servos voor gebruiken,
dat wordt een beetje veel. Dus is de eerste uitdaging hoe ik 2 bewegingen kan combineren op 1 aandrijving.
Ik kies voor het bewegen naar voren en achteren in combinatie met de armen omhoog-omlaag.
Voor iets oppakken, bedenk ik mij deze opeenvolging; eerst moet hij naar voren bewegen, daarna de
armen omhoog en dan moet hij weer naar achteren bewegen. Vervolgens moet hij draaien en kan de vorige
afloop weer andersom om het weer neer te zetten; eerst naar voren, armen omlaag en weer naar achteren.
Theorie.
Dit is dus een heen en terug beweging gecombineerd met een heen beweging. Ik neem een schijf en ik draai die 180 graden
(half rond). Dan kan ik in deze draai een punt aan de zijkant naar voren en weer naar achteren bewegen.
Als ik nu ook iets aan de achterkant bevestig dan komt dat bij deze zelfde draai alleen maar naar voren.
In het begin van deze draai komt het punt aan de achterzijde nauwelijks naar voren maar beweegt opzij
terwijl het punt aan de zijkant zijn grootste voorwaartse beweging maakt. In het midden van de draai
beweegt het punt van de zijkant nauwelijks meer naar voren terwijl het punt van achteren dan de grootste
beweging maakt. Zo kan je dus de armen redelijk stil houden als het poppetje naar voren beweegt en de armen
laten bewegen als het poppetje in de voorste stand staat. De armen bewegen weer bijna niet als de schijf
doordraait en het poppetje weer naar achteren trekt.
Hierna een paar opnames van een eerste testopstelling om te kijken of de theorie en de praktijk overeenkomen.
 |
 |
|
|
2 stangen aan een “schijf” 90 graden verschoven t.o.v. elkaar.
|
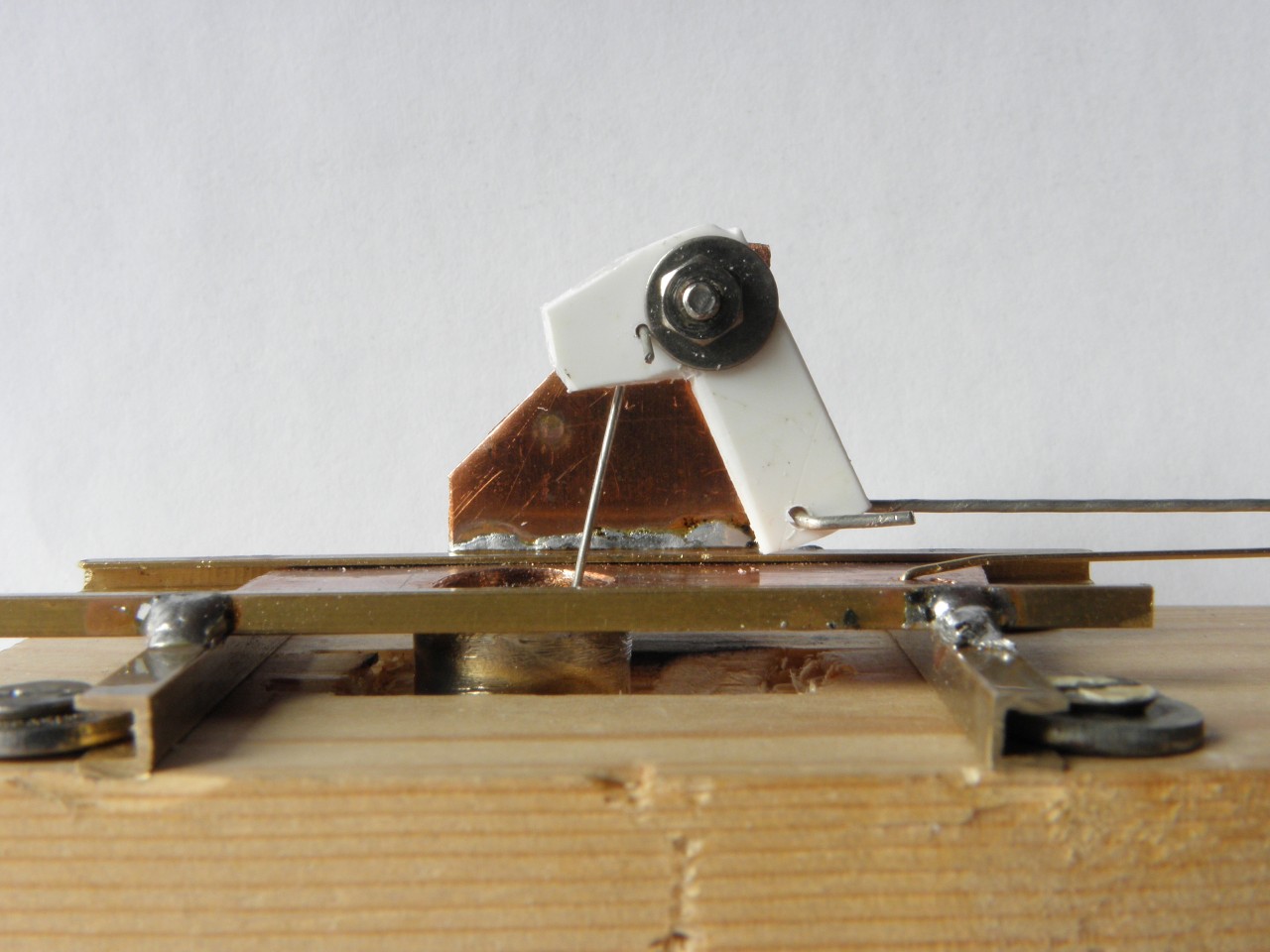
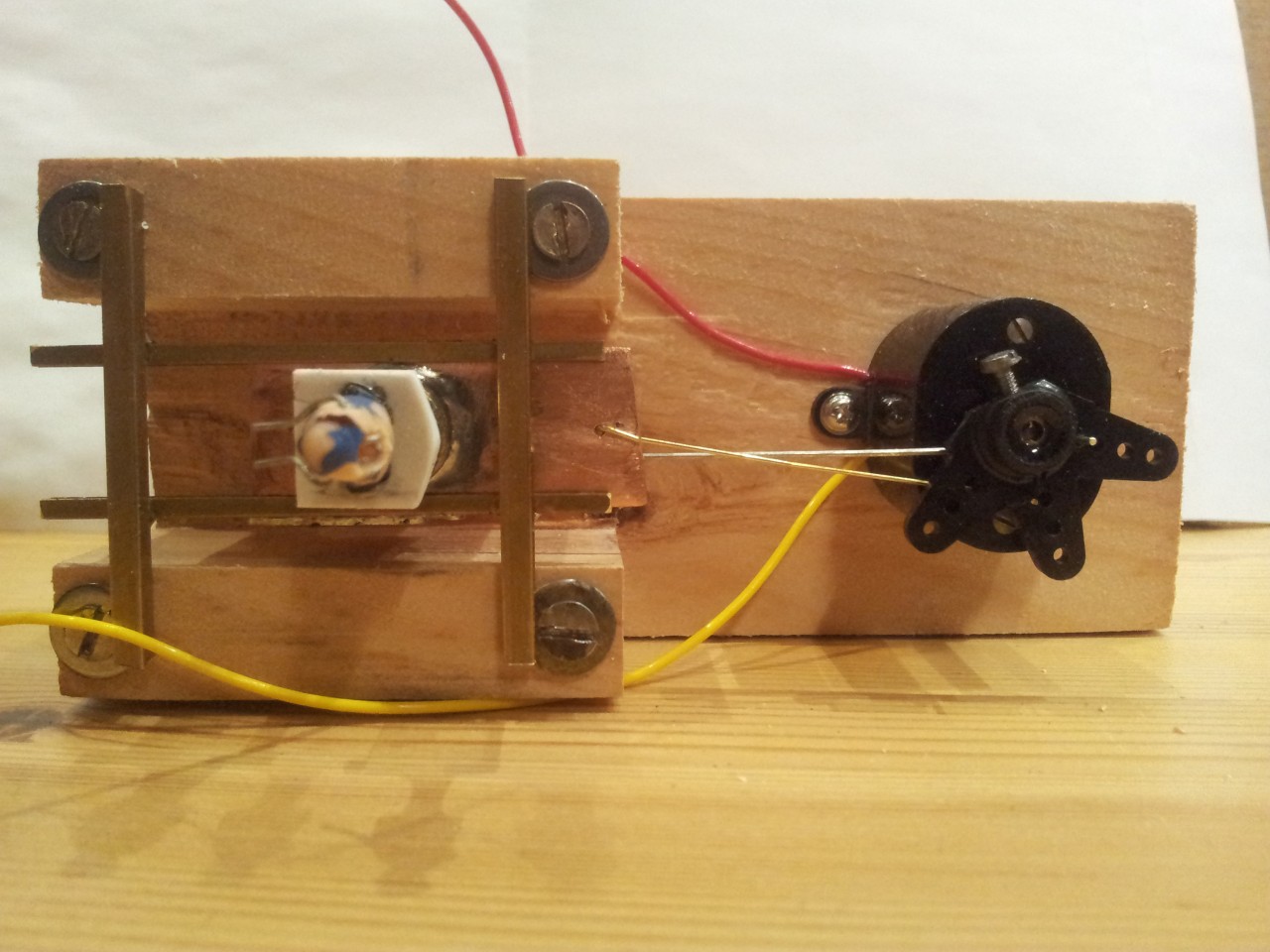
Het andere einde van de stangen. De onderste schuift een plaat koper tussen 2 messing
U-profielen door. Dit moet de heen en terug beweging van het poppetje worden.
De bovenste stang beweegt via een haakse overbrenging een ander stangetje op en neer door een gat.
|
 |
Het totaal.
|
 |
Op het gat zit een bus gesoldeerd waarop het poppetje komt te staan.
Hierna moet het poppetje worden voorbereid om bewegende armen te krijgen.
Ik heb een dikke pop genomen en die met een tandarts frees van achteren uitgehold.
Daarna heb ik door 1 van zijn benen een 1mm gat geboord van zijn voet tot in
de rug-holte. Hier past gemakkelijk de stang van 0,5mm door om de armen te bewegen.
De armen van de pop heb ik eraf gevijld en daarna een gat van 0,5mm geboord van
schouder tot schouder. Een draadje van 0,5 mm er doorheen en die met een punttangetje
naar achteren getrokken, dat bleek best makkelijk. Toen de stang vanuit het been
daaromheen gebogen zoals op de foto is te zien.
Dan de “armen” naar voren gebogen, die moeten later nog worden opgedikt om wat echter te lijken.
|
|
Nu moet het geheel van een aandrijving worden voorzien. Hiertoe heb ik een U vormig
stuk hout gezaagd waar de pop op gemonteerd wordt zodat je later het geheel zo door
een gat in de baan kan monteren.
Ik had nog een klein motortje liggen dat vroeger op een modelboot de radar deed ronddraaien.
Dat had een mooie vertraging en was klein maar bleek later toch te snel te draaien.
Nadat ik de spanning tot 2,5 volt had laten zakken vond ik het toch langzaam genoeg.
Nu de "schijf", die inmiddels een paar armen minder heeft, op het motortje gelijmd en nog met een schroefje vastgezet.
Zie hier het resultaat, van zij en van boven.
|
 |
 |
|
|
Het kon vast kleiner maar dit werkt prima.
Nu nog zo maken dat hij niet te ver draait en uit zichzelf stopt.
Ik heb de schijf ingekort tot 90 graden om met de uiteinden
een relais in te kunnen drukken. Voor de wisselmotoren van Fulgurex
zijn er bij Conrad uitbreidingsschakelaars te koop en deze zijn mooi
klein om iets af te schakelen.
|
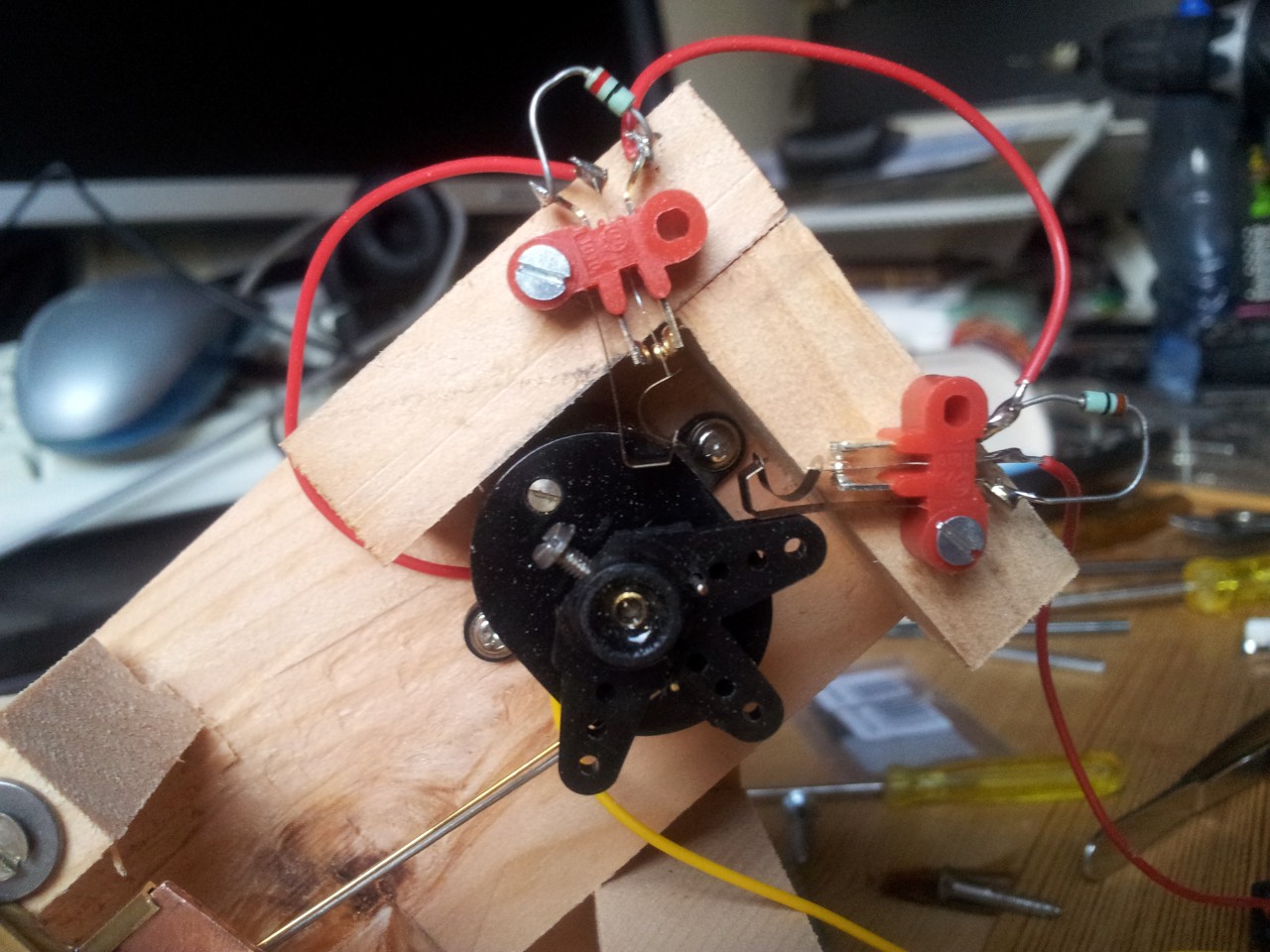 |
2 blokjes hout naast de motor en daarop de 2 eindafschakelrelais.
Beide relais zijn overbrugd door een diode om ervoor te zorgen dat de
motor wel de andere kant op kan draaien zodra de spanning wordt omgedraaid.
|
 |
Dat is deel 1, het poppetje kan nu iets oppakken een ermee naar achteren bewegen.
Nu moet hij nog kunnen draaien. D.w.z. dat dit stuk hout met motor en poppetje moet gaan draaien.
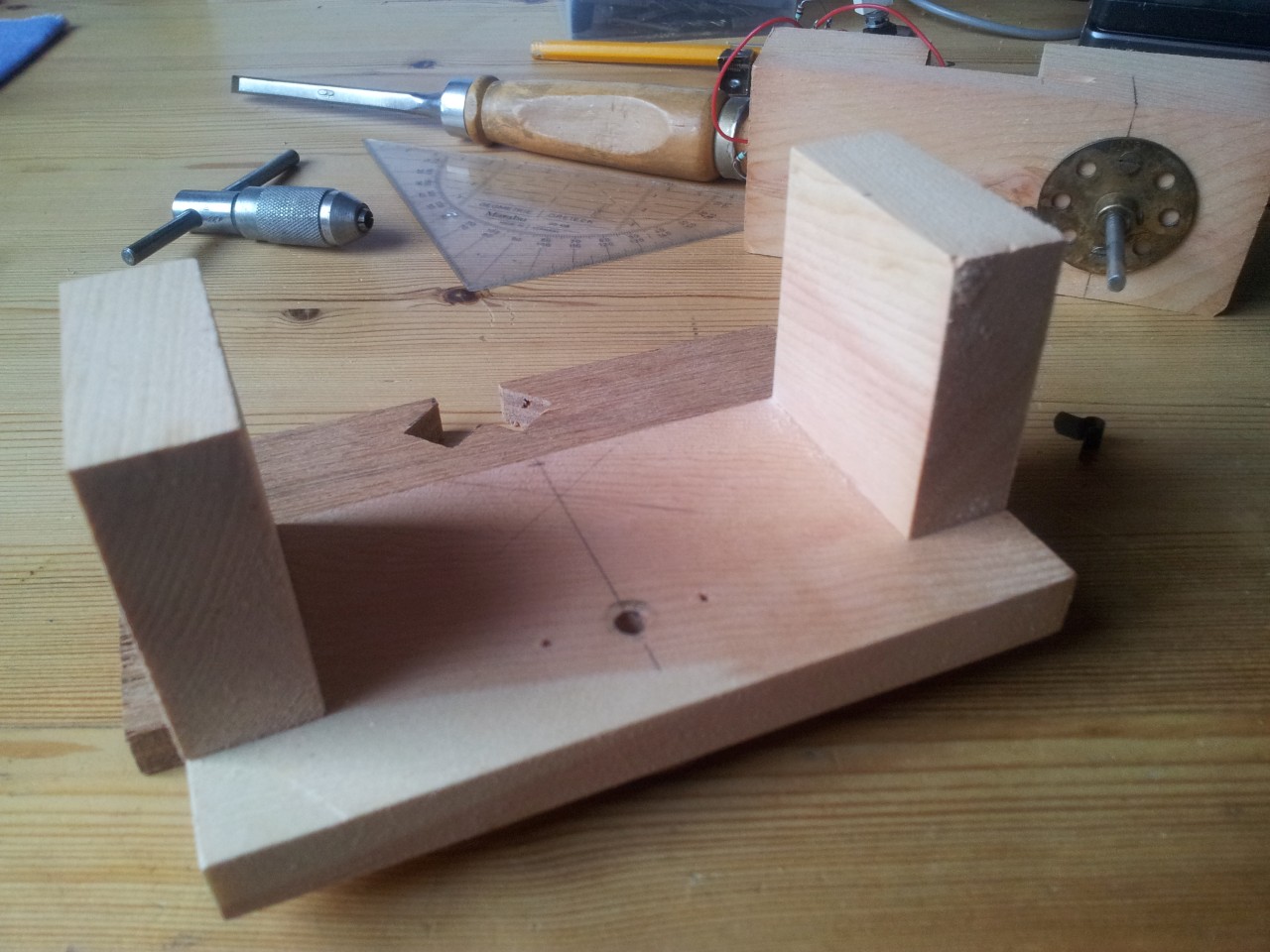
Op zich niet al te moeilijk. Ik boor een gat van 4 mm recht onder de achterste positie van het poppetje.
Dit wordt het draaipunt. Nu heb ik een plankje genomen een daarop afgetekend welke ruimte nodig is om de
pop 90 graden te laten draaien en daarnaast heb ik 2 plankjes erop gelijmd om alles daarmee onder de baan te kunnen monteren.
|
 |
 |
|
|
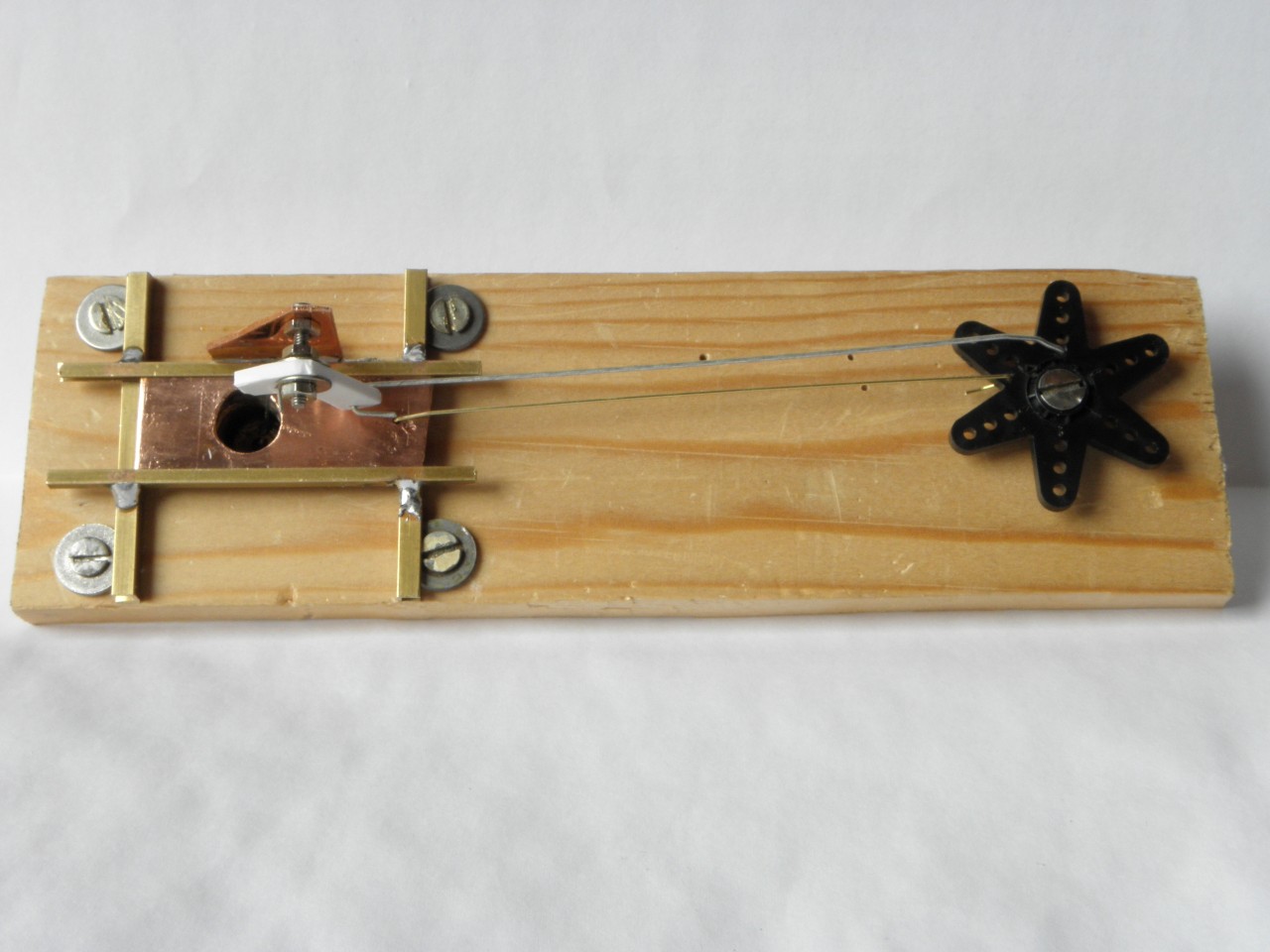
Onder aanzicht
|
Boven aanzicht
|
|
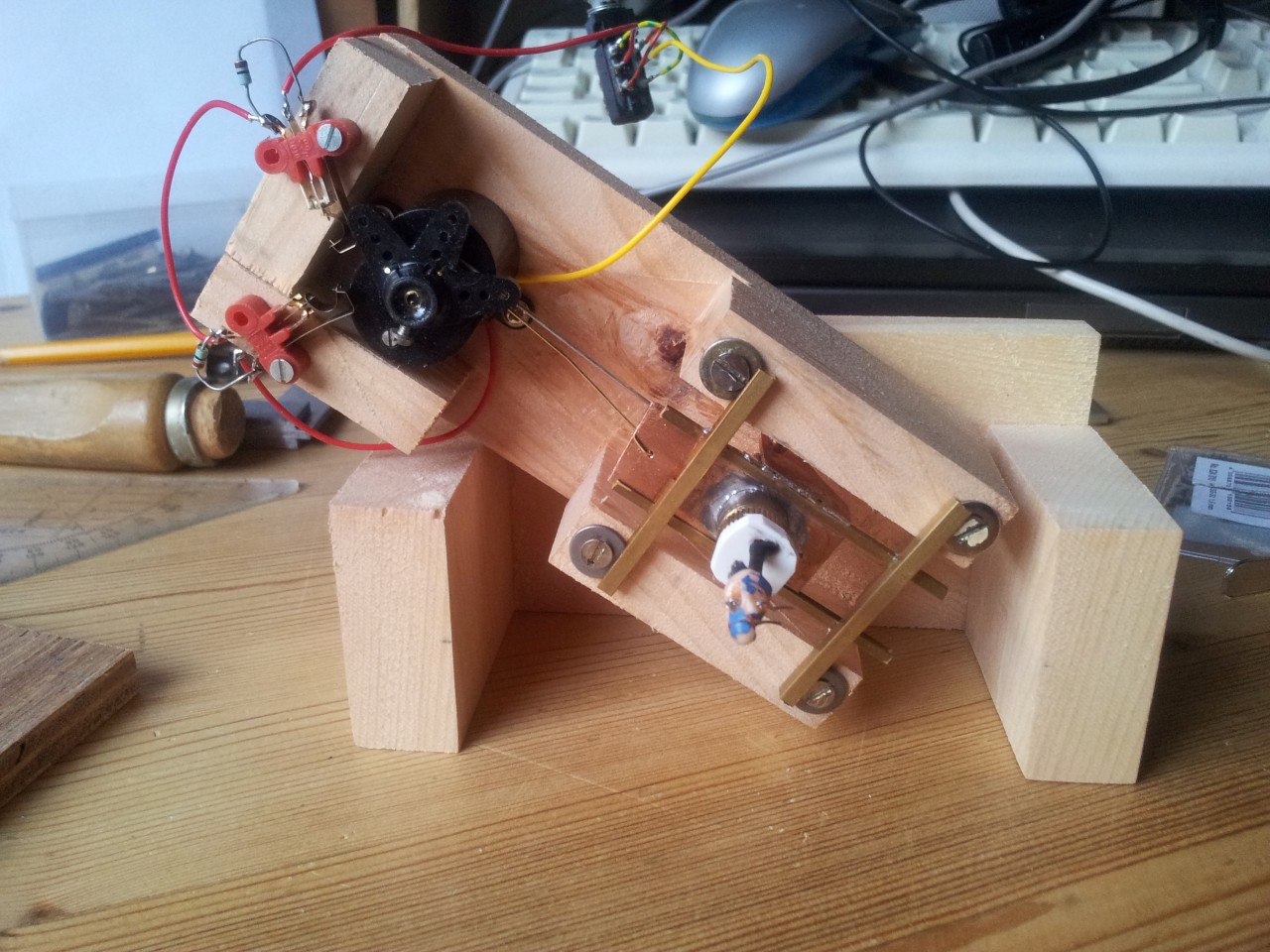
Onder en boven het gat heb ik een Meccano wiel geschroefd om als lager te dienen. Dan krijg je
bovenstaande geheel:
|
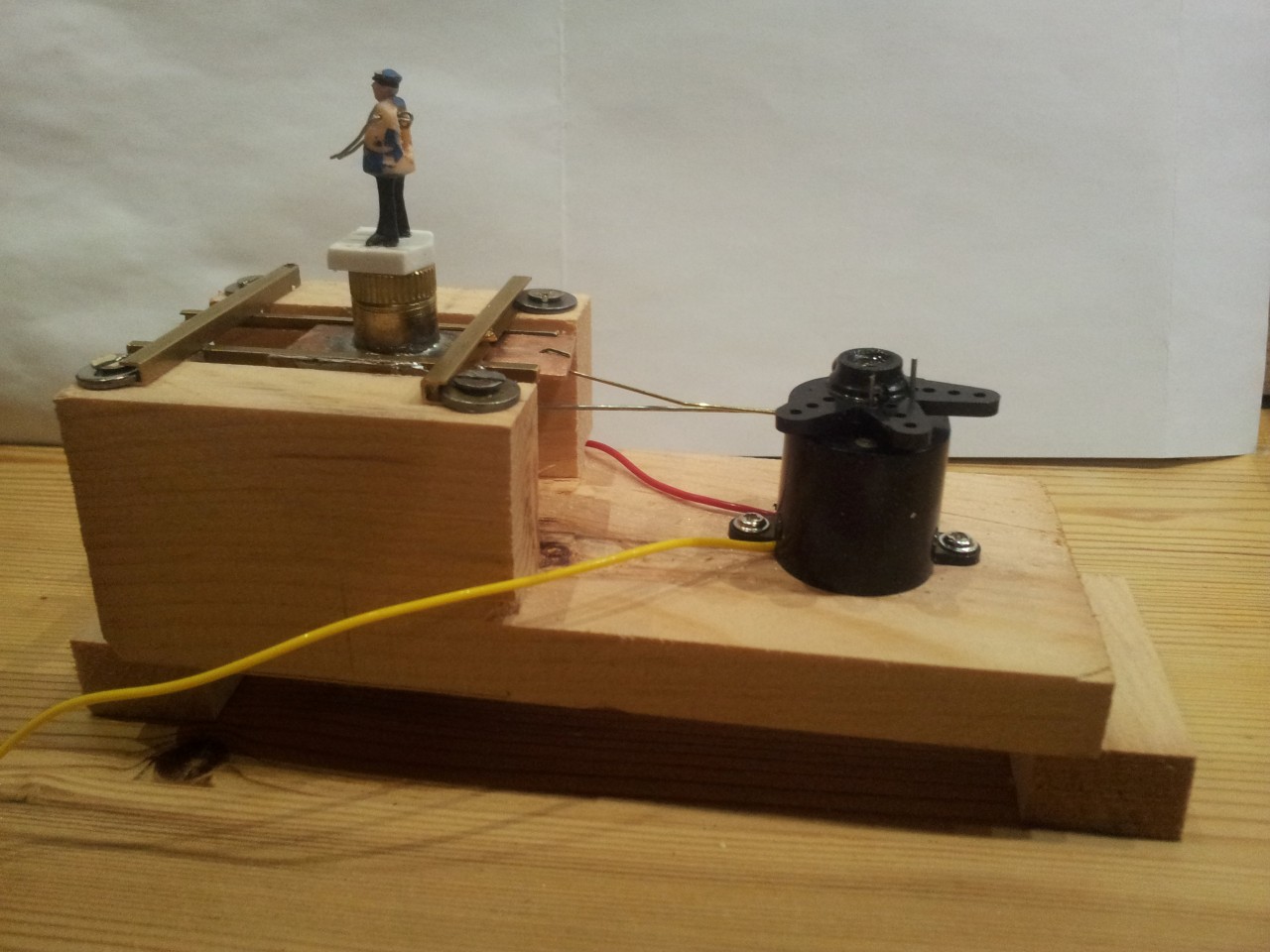
 |
Opstelling compleet. Het witte blokje vervangt de kabelbaan.
|
 |
Aandrijving
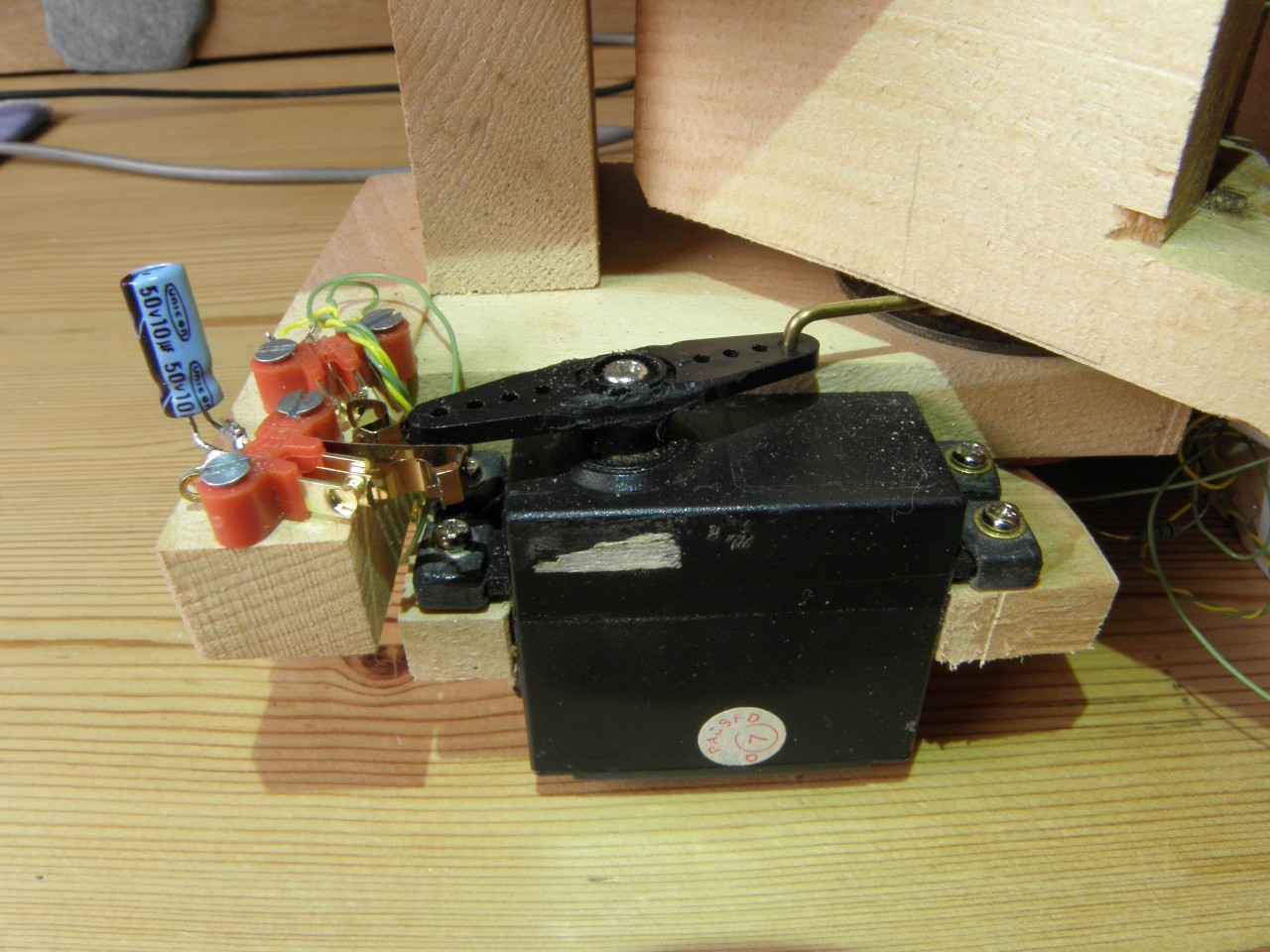
Dan nu een aandrijving voor het draaien van het poppetje.
Ik heb hier gekozen voor een servo omdat ik hier wat meer kracht denk nodig te hebben.
Een normale servo is ingericht om 180 graden te draaien. Ik wilde geen ompoolschakeling
gebruiken maar hem steeds een halve draai laten maken in dezelfde richting, dat is
elektrisch makkelijker. Dus ik heb het laatste tandwiel aangepast en de blokkering
eruit gehaald, nu kan hij rond blijven draaien. Wel moet je dan de potmeter eruit
halen want die kan niet rond. Ook de rest van de elektronica heb ik eruit gehaald en
gewoon 2 draadjes van de motor naar buiten laten komen, verder niets.
Op de servo een arm gemonteerd met 2 gelijke einden zodat je met een schakelaar zoals
je die ook op de foto hiernaast ziet steeds per halve omwenteling kan afschakelen.
|
|
Je ziet hier 2 schakelaars vlak naast elkaar zitten. De voorste (en eerste) is om
het start relais uit te schakelen, de 2de is om de servo te stoppen.
|
De schakelvolgorde
|
Stap1
|
Als de kabelbaan beneden komt schakelt hij een relais in met een korte puls,
het relais houdt zichzelf vast. Dit relais keert de spanning voor het bewegen
van het poppetje om zodat hij iets gaat pakken.
|
|
Stap2
|
Zodra de motor van het poppetje een halve slag gedraaid heeft schakelt hij de servo in en zichzelf uit (2 schakelaars op de zelfde plek boven elkaar).
|
|
Stap3
|
De servo draait het poppetje 90 graden en vlak voordat hij rond is schakelt hij het relais weer uit (het relais houdt zich zelf vast en dat wordt onderbroken), daarna stopt hij door de 2de schakelaar.
|
|
Stap4
|
het start relais is weer uit en terug omgepoold, daardoor beweegt het poppetje terug en zet hij de melkfles weer neer.
|
|
Niks niet moeilijke elektronica, gewoon een relais en een paar momentschakelaars.
|
Zover deel 2. Nu moet hij nog samen gebouwd worden met de kabelbaan en in de baan worden ingebouwd.
 |
Tot slot een film van het laden en lossen door dit poppetje.
Hier gebruik ik nog een schroef, dat moet natuurlijk een melkbus
worden.
Zowel op de aanhanger als op de "kabelbaan" wordt de schroef door
een kleine magneet op zijn plaats gehouden.
|
Hans Hosang.